

摘要:,,本文研究了智能车辆的设计与实现,重点探讨了基于深度学习的自动驾驶系统。通过深度学习的算法,智能车辆能够识别环境信息,自主决策并控制行驶。该设计旨在提高车辆的安全性和行驶效率。研究内容包括自动驾驶系统的构建、深度学习算法的优化及其在智能车辆中的应用。这种技术有望推动汽车行业的革新,实现更智能、更安全的驾驶体验。
本文目录导读:
随着人工智能技术的飞速发展,自动驾驶技术已成为当前研究的热点领域,本文旨在探讨基于深度学习的智能车辆的设计与实现,通过综合运用计算机视觉、自动控制、深度学习等技术,实现车辆的自动驾驶功能,本文首先介绍了自动驾驶的背景和意义,接着详细阐述了系统的总体设计思路、关键技术、实验验证以及结果分析,总结了研究成果,展望了未来的研究方向。
随着交通拥堵、安全问题等日益凸显,自动驾驶技术逐渐成为汽车工业和信息技术领域的研究热点,自动驾驶车辆通过集成传感器、控制器、执行器等设备,实现车辆的智能感知、决策、规划和控制,基于深度学习的自动驾驶系统是实现自动驾驶的关键技术之一,本文旨在设计并实现一种智能车辆,通过深度学习技术实现车辆的自动驾驶功能。
系统总体设计
智能车辆的设计主要包括硬件和软件两部分,硬件部分包括车辆平台、传感器、控制器等;软件部分包括感知模块、决策规划模块、控制模块等。
1、硬件设计
(1)车辆平台:选用合适的车辆作为平台,要求具有良好的稳定性和安全性。
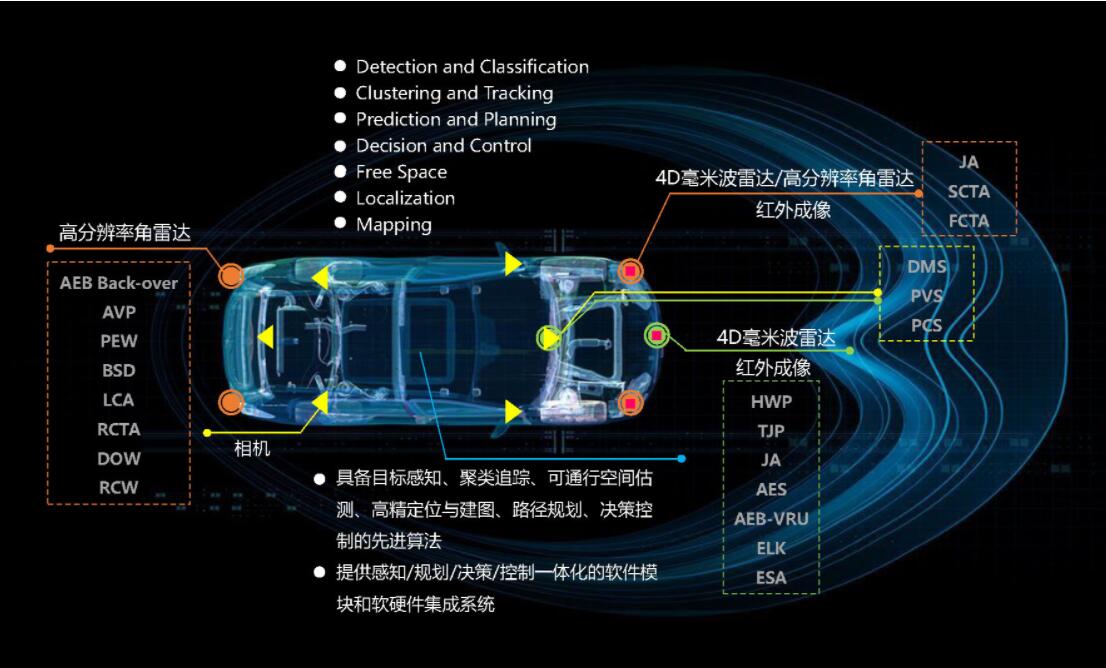
(2)传感器:选用激光雷达、摄像头、超声波等传感器,实现车辆周围环境的感知。
(3)控制器:选用高性能的计算机或嵌入式系统作为控制器,负责处理感知信息、决策规划和控制。

2、软件设计
(1)感知模块:通过深度学习技术,对摄像头和激光雷达等传感器采集的数据进行处理,实现车辆周围环境的感知。
(2)决策规划模块:根据感知信息,通过深度学习技术训练决策模型,实现车辆的决策和规划。
(3)控制模块:根据规划信息,通过自动控制技术实现车辆的速度和方向的自动控制。
关键技术
1、深度学习技术:用于感知模块和决策规划模块,通过训练神经网络模型,实现对车辆周围环境的感知和决策规划。
2、计算机视觉技术:用于图像处理,提取图像中的特征,辅助深度学习模型进行环境感知。
3、自动控制技术:用于控制模块,通过控制车辆的油门、刹车和方向盘等执行器,实现车辆的自动控制。
实验验证与结果分析
1、实验环境:在封闭场地和开放道路两种环境下进行试验,以验证系统的性能。
2、实验内容:包括车辆行驶、障碍物识别、路径规划等实验。
3、实验结果:实验结果表明,系统在封闭场地和开放道路环境下均能实现自动驾驶功能,具有较高的稳定性和安全性。
4、结果分析:通过对实验结果进行分析,验证了深度学习技术在自动驾驶系统中的应用效果,证明了系统的可行性和实用性。
本文设计并实现了一种基于深度学习的智能车辆自动驾驶系统,通过综合运用计算机视觉、自动控制、深度学习等技术,实现了车辆的自动驾驶功能,实验结果表明,系统在封闭场地和开放道路环境下均具有良好的性能。

本研究仍存在一定的局限性,如复杂环境下的鲁棒性、安全性等问题需要进一步研究,未来研究方向包括:提高系统的鲁棒性和安全性;优化深度学习模型以提高性能;拓展系统的功能,如实现更高级别的自动驾驶功能等。
基于深度学习的智能车辆设计与实现具有重要的研究意义和应用价值,本研究为智能车辆的进一步发展提供了有益的参考和启示。
参考文献
[此处插入参考文献]
致谢
感谢指导老师和实验室同学们在毕业设计过程中的帮助和支持,感谢学校提供的良好学术氛围和实验条件,也感谢参考文献的作者们为本文提供的宝贵资料和启示。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...